AUTMan Humanoid Robot
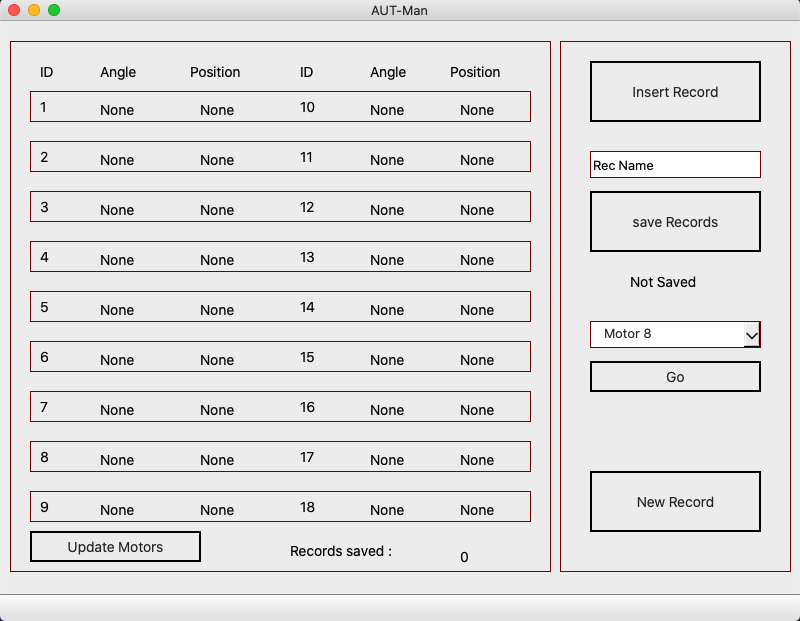
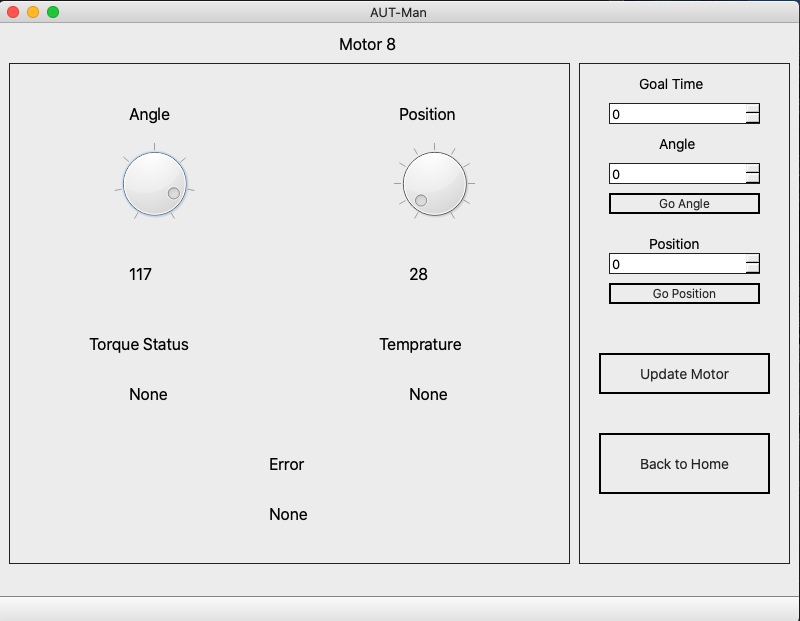
Motion Editor (KIARASH)
This application is for monitoring and configuring all of the HERKULEX 18 motors in KIARASH, an Iranian standard platform humanoid robot. Also, seqeunce of motions can be captured for motion generation.
Source code of the project is available through here
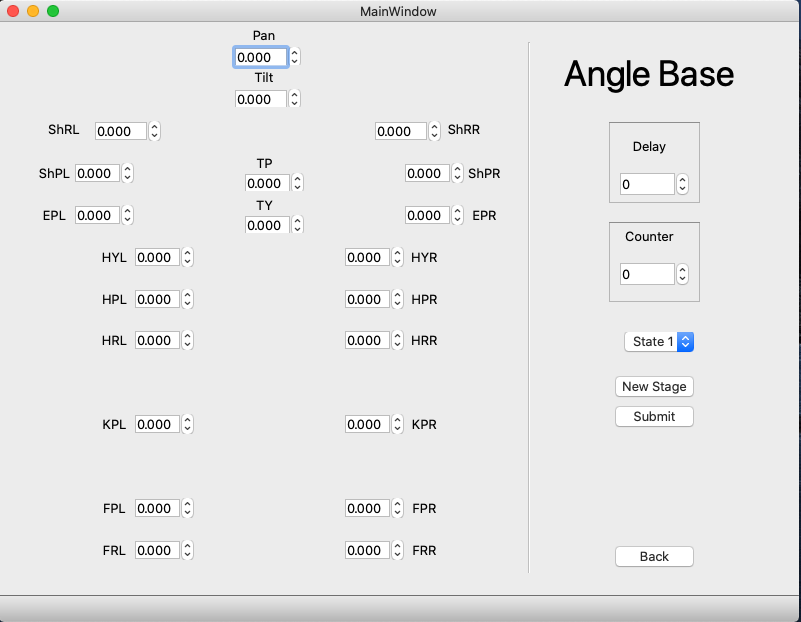
Motion Editor (Robocup)
This application is for monitoring Dynamixel motors and motion generation for AUTMan team’s teen size humanoid robot for international Robocup 2017 competition.
Soure code of the project is available through here
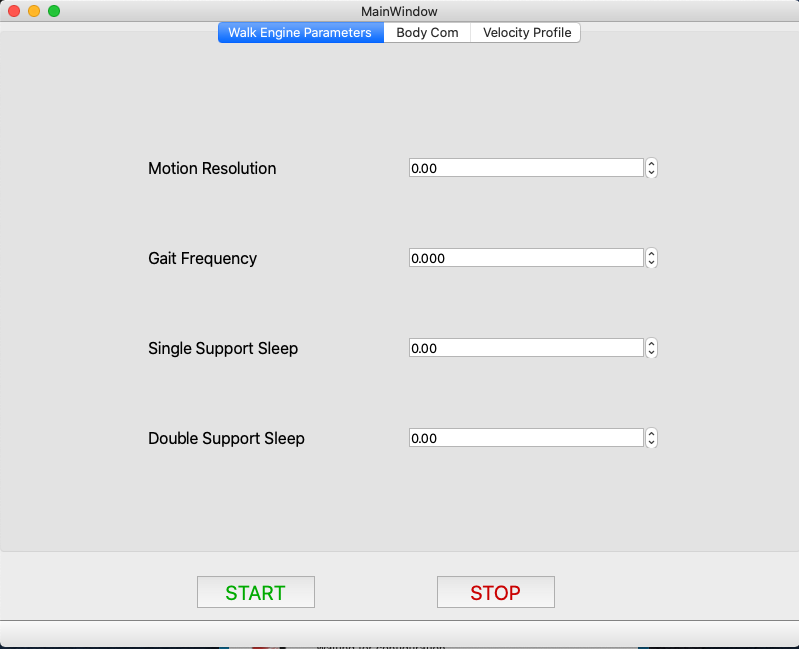
Walk Tuner
This application is used for configuring walking parameters in teen size humanoid robots, developed for international Robocup 2017 competition.
Soure code of the project is available through here
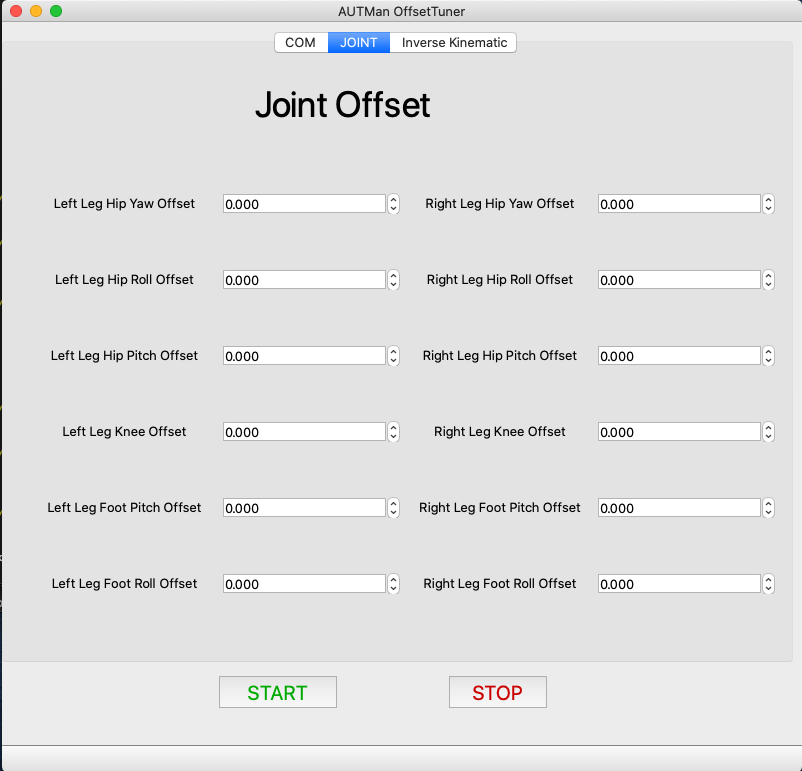
Offset Tuner
This application is used for tuning the offset parameters for teen size humanoid robot, developed for international Robocup 2017 competition.
Soure code of the project is available through here
Technologies/Languages Used
| Technology | Usage |
|---|---|
 |
Python is the languages used for projects. |
 |
Qt and its python wrapper, PyQt frameworks are used for developing applications. |
 |
SQLite is used as database |
Project information
- Category: Robotics, AI
- Client: Bio-Inspired System Design Lab
- Project date: Summer 2016 - August 2017
Project Description
List of applications which I developed for AUTMan's teen size robot during my research assistance period at Bio-Inspired System Design Lab at Amirkabir University of Technology